
 室外全天候无人搬运/牵引AGV
室外全天候无人搬运/牵引AGV
 当前位置:
当前位置:
面向广泛的室外智能搬运需求,宇锋智能推出技术领先的综合智能无人驾驶搬运平台,系统采用高精度差分GPS,高精度惯导,机器视觉等融合自主导航定位技术,采用多线激光雷达,图像,毫米波雷达等综合环境感知技术,研发出面向复杂场景的路径规划和决策控制系统,完全实现了全天候的智能无人驾驶搬运平台。
宇锋智能无人牵引车以宇锋仓储全电动室外牵引车作为载体,其采用美国CURTIS柯蒂斯电控,控制器多重自动保护。电机采用AC交流驱动系统,无碳刷,免维护,高效能电机,精确控制,输出强劲动力。电机驱动无级调速,安全,静音,紧急反向装置/紧急制动开关。机械结构上采用低重心设计,行驶时稳定性强。
宇锋智能无人牵引车的智能无人驾驶系统以高精度GPS和三维激光雷达环境感知系统作为自主导航的核心模块,运动决策层采用从层决策机制,运动控制层利用经典控制理论和现代控制算法相结合的综合控制算法,整体系统以高复杂性和算法领先性实现牵引车的优异性能表现。






|
名 称 |
单位 |
全电动站驾式无人搬运车车体 |
|
动力类型 |
|
电动 |
|
轮胎配置 |
|
聚氨酯 |
|
整车高度 |
mm |
2200±10% |
|
全长 |
mm |
1550±10% |
|
全宽 |
mm |
850±10% |
|
轴距 |
mm |
950±10% |
|
车体总重 |
KG |
550±10% |
|
前轮 / 后轮 |
mm |
Ø230*75 / Ø150*50 |
|
负载 |
T |
3吨,3节拖车以上 |
|
电池容量 |
V/Ah |
24/210 |
|
驱动马达 |
Kw |
1.5±10% |
|
行驶环境耐受 |
|
防水、防高温低寒、防湿 |
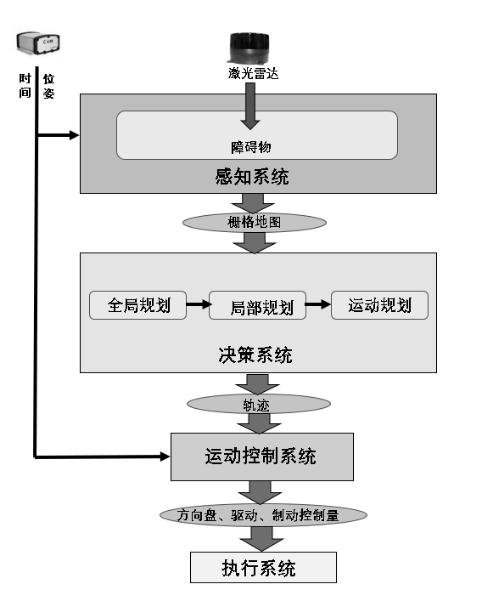
宇锋无人牵引车采用的智能系统分层式体系结构,该结构拥有明确的接口体系以及递进的性能表现,如图所示,包括系统输入、感知系统、决策系统、运动控制系统、执行系统等模块。













 皖公网安备 34012302000783号
皖公网安备 34012302000783号