
 交通调度
交通调度
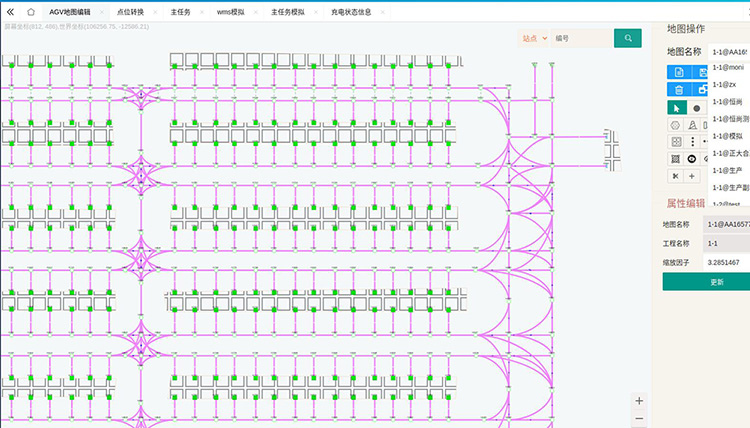
地图编辑 :上位系统中动态绘制或调整地图,地图实时生效, AGV无需烧录地图信息;
区域关联 :绑定站点和路线,设定不同的调度策略(i.e.仅允许一辆车进入…);
CAD地图导入 :利用项目CAD地图快速导入构建模拟仿真工程;
跨楼层跨厂区 :可以把不同厂区和不同楼层的地图关联起来,实现复合调度功能;
岔路口交通管制: 通过路口或单行区域进行系统控制,调度AGV通行顺序,不会造成拥堵;
智能路线调整 :当AGV遇到拥堵不能前进超过一定时间,尝试寻找新的路线重新调度,提高AGV利用率。
 当前位置:
当前位置:








 皖公网安备 34012302000783号
皖公网安备 34012302000783号